औद्योगिक रोबोटों में अत्यधिक लचीलापन और सटीकता, कार्य वातावरण पर कम आवश्यकताएं, टिकाऊ संचालन, स्थिर उत्पाद गुणवत्ता और उच्च दक्षता होती है। कारखाने ने स्वचालित असेंबली लाइन लोडिंग और अनलोडिंग प्रणाली स्थापित करने के लिए यास्कावा 6-अक्ष हैंडलिंग रोबोट GP12 को पेश किया।
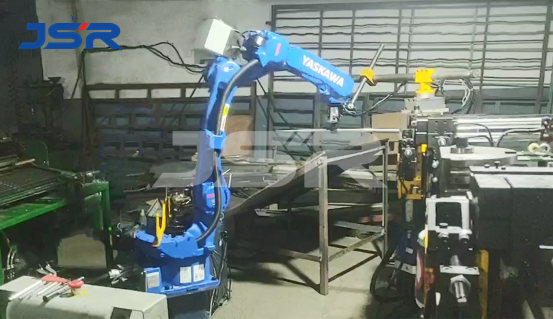
यह एक साइकिल पार्ट्स बनाने वाली कंपनी है, और GP12 साइकिल के हैंडलबार को लोड और अनलोड करने का काम करता है। उसे स्टील पाइप को बिंदु A से पाइप बेंडर तक ले जाना है। प्रोसेसिंग के बाद, पाइप बेंडर उसे निकालकर बिंदु B पर ले जाता है। इसे सही तरीके से ले जाना ज़रूरी है।
कार्यक्रम कार्यान्वयन:
1. इंजीनियर ग्राहक स्थल के वास्तविक कार्य वातावरण के अनुसार उचित लेआउट योजना और निर्माण करेगा।
2. क्षेत्र के बाहरी उपकरण और रोबोट द्वारा आवश्यक संकेतों के अनुसार सिग्नल इंटरैक्शन वायरिंग का संचालन करें।
3. रोबोट तर्क कार्यक्रम को प्रोग्राम किया और रोबोट प्रक्षेप पथ सिखाया।
4. कार्यक्रम परीक्षण नियंत्रण आवश्यकताओं और उत्पादन आवश्यकताओं को पूरा करता है।
5. साइट पर स्थापना और डिबगिंग का कार्य पूरा किया, और ग्राहकों के लिए उपकरण संचालन प्रशिक्षण प्रदान किया।
6. कुछ दिनों के काम के बाद, ऑन-साइट उपकरण में शून्य विफलता दर होती है, जो कारखाने के 24 घंटे के निर्बाध उत्पादन को पूरा कर सकती है।
हैंडलिंग रोबोट श्रमिकों की श्रम तीव्रता को कम करता है, उत्पादन और कार्य कुशलता में सुधार करता है, श्रमिकों की व्यक्तिगत सुरक्षा सुनिश्चित करता है, और स्वचालन, बुद्धिमत्ता और मानवीकरण का एहसास करता है। Jiesheng प्रत्येक ग्राहक के लिए अनुकूलित औद्योगिक रोबोट स्वचालन समाधान प्रदान करने के लिए तैयार है।

पोस्ट करने का समय: 09-नवंबर-2022
